























Hagrid's Wild Ride is a free motion Virtual Reality rig meant to provide the user with the ability to move in three axes and experience the same accelerations and movements in a Virtual Reality broomstick flight simulation environment. Built to appeal to ever growing fanbase of Harry Potter novels, we were happy to see that our project was received with excitement by the CMU community.
There are three main parts to Hagrid's Wild Ride.
1. Mechanical
2. User Input
3. Virtual Environment
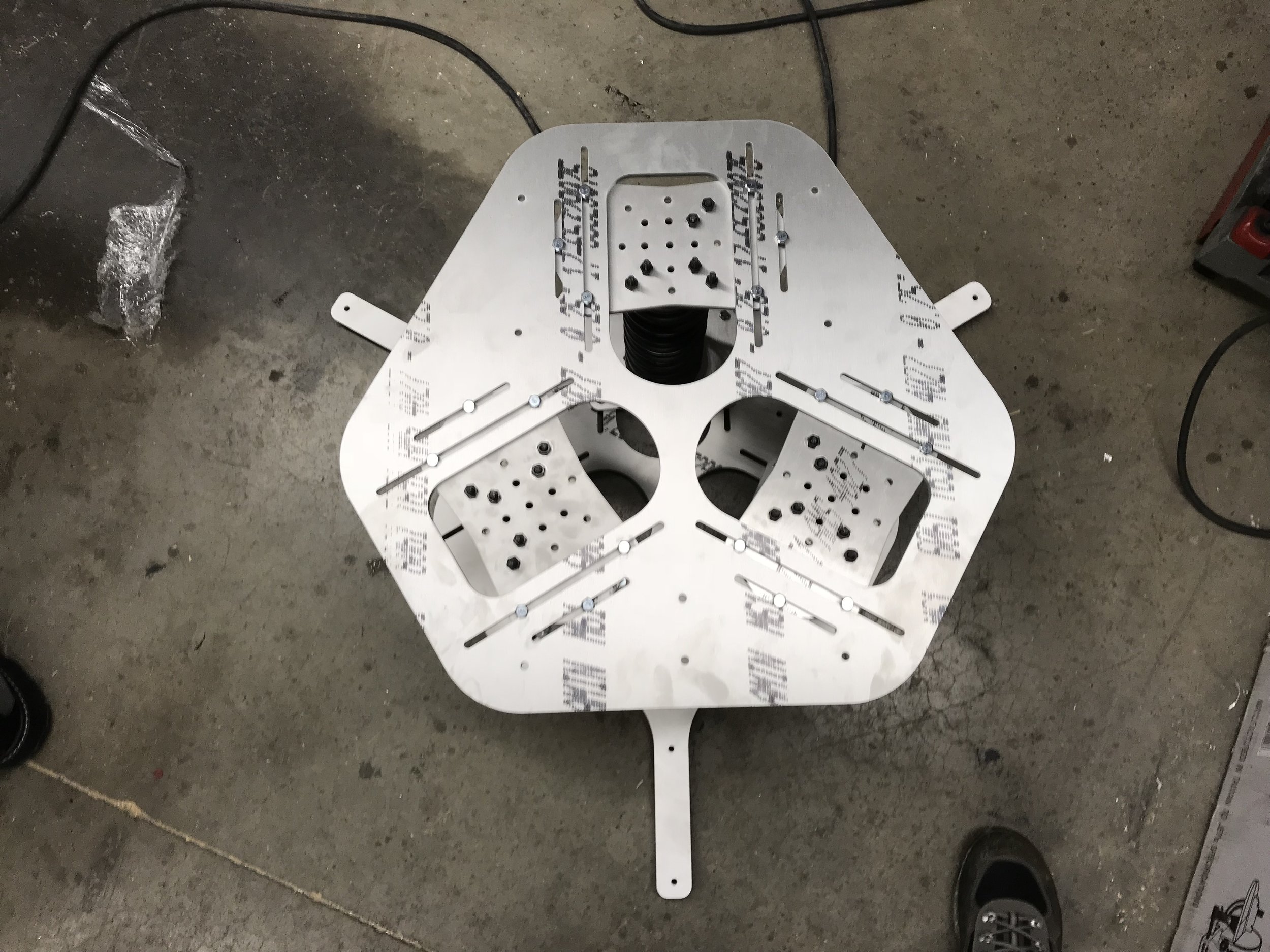
Mechanical
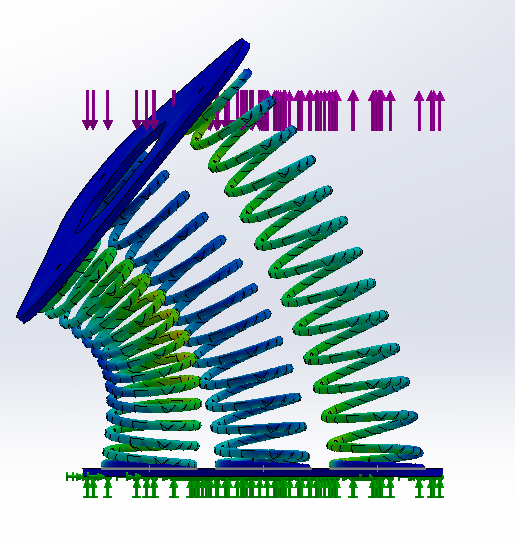
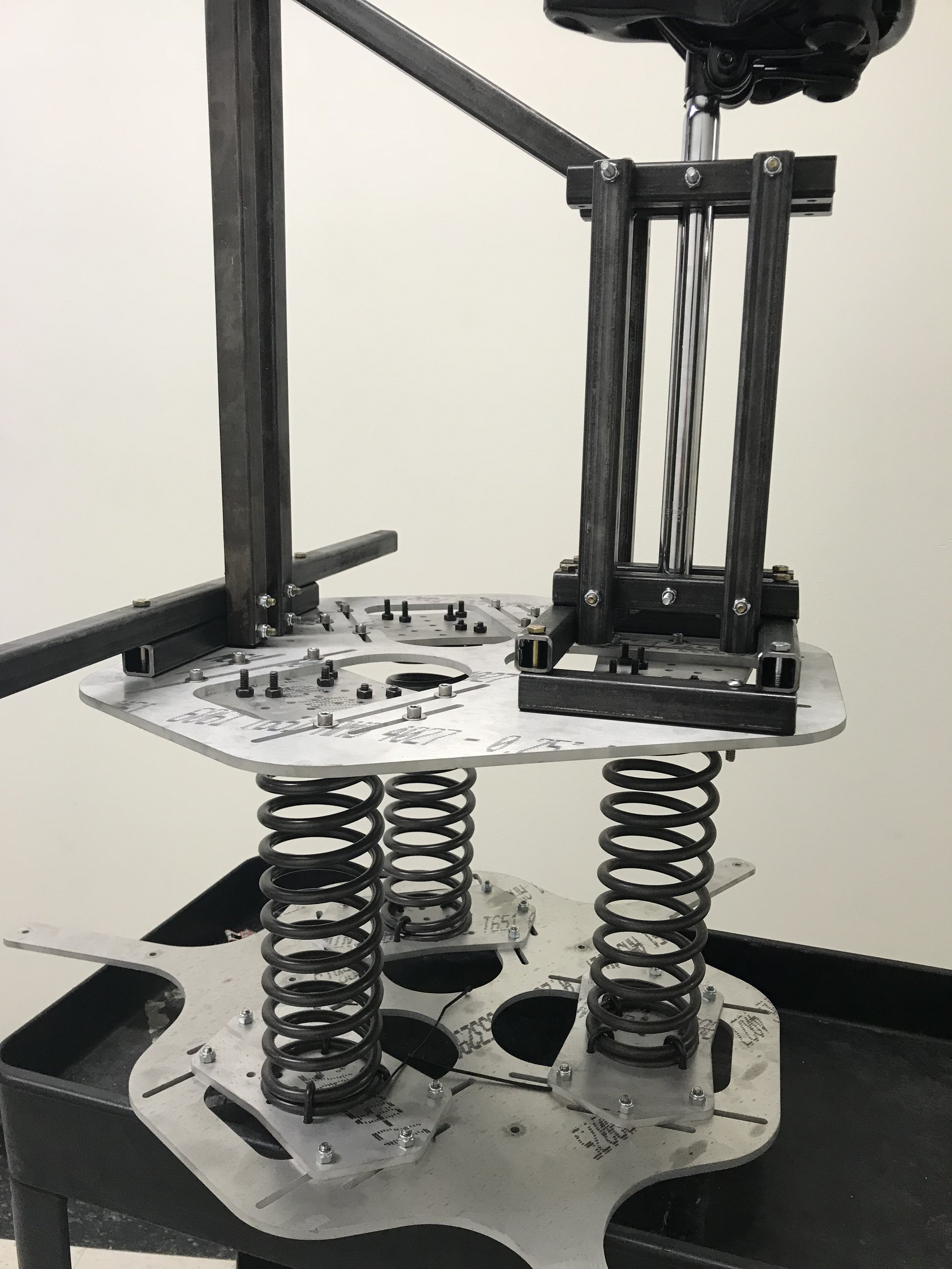
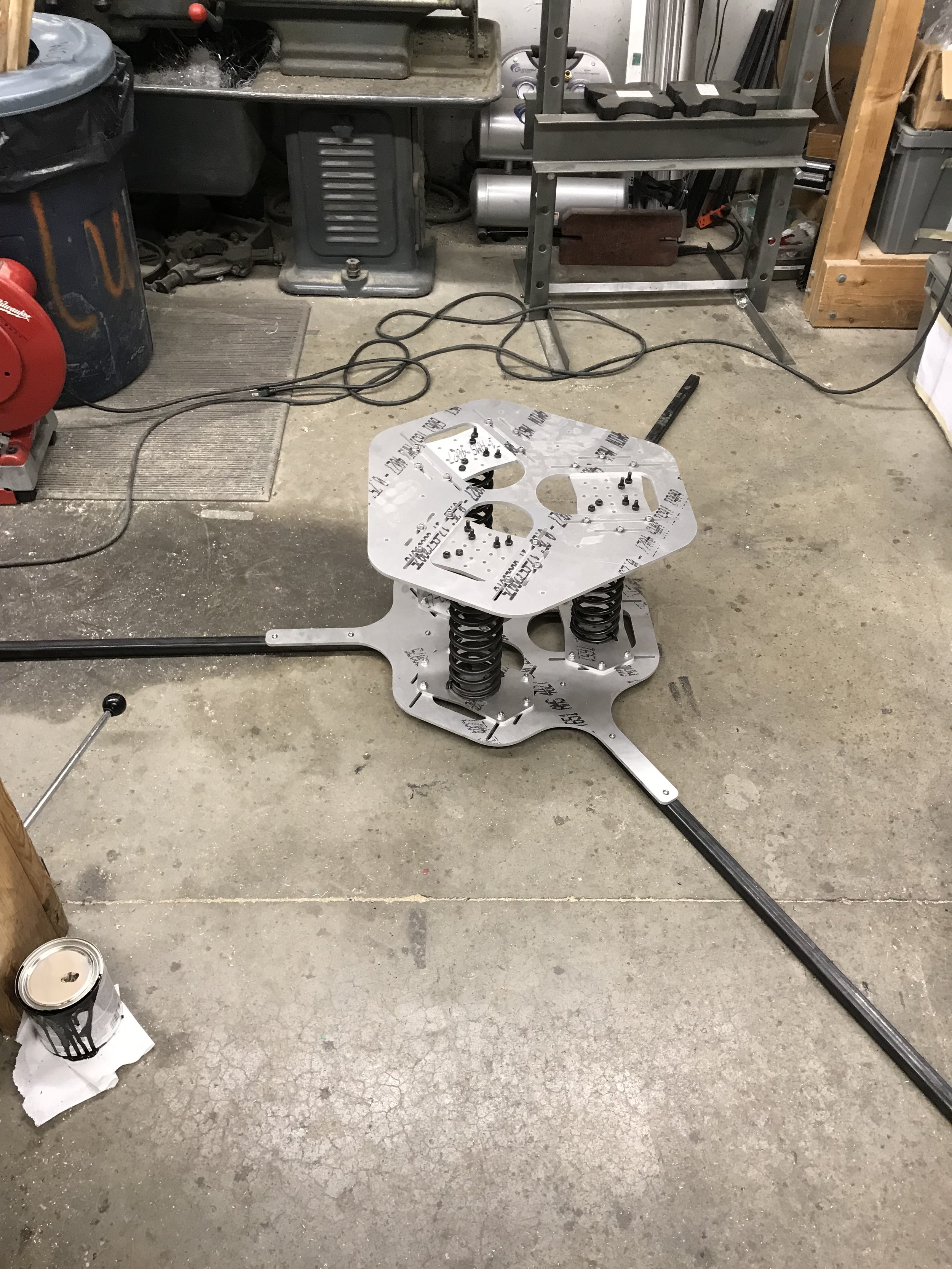
The project utilizes machined parts in order to make the free motion possible. Originally inspired by the rides in children's playgrounds with single springs, we realized that the linear nature of springs provided the freedom we needed for the rig. We used Solidworks for CAD work and sent the files to a third party waterjet service which produced our parts on 1/4" 6061 Aluminum. Steel tubes were milled in house and the entire rig was assembled in Carnegie Mellon's Robotics Club.
User Input
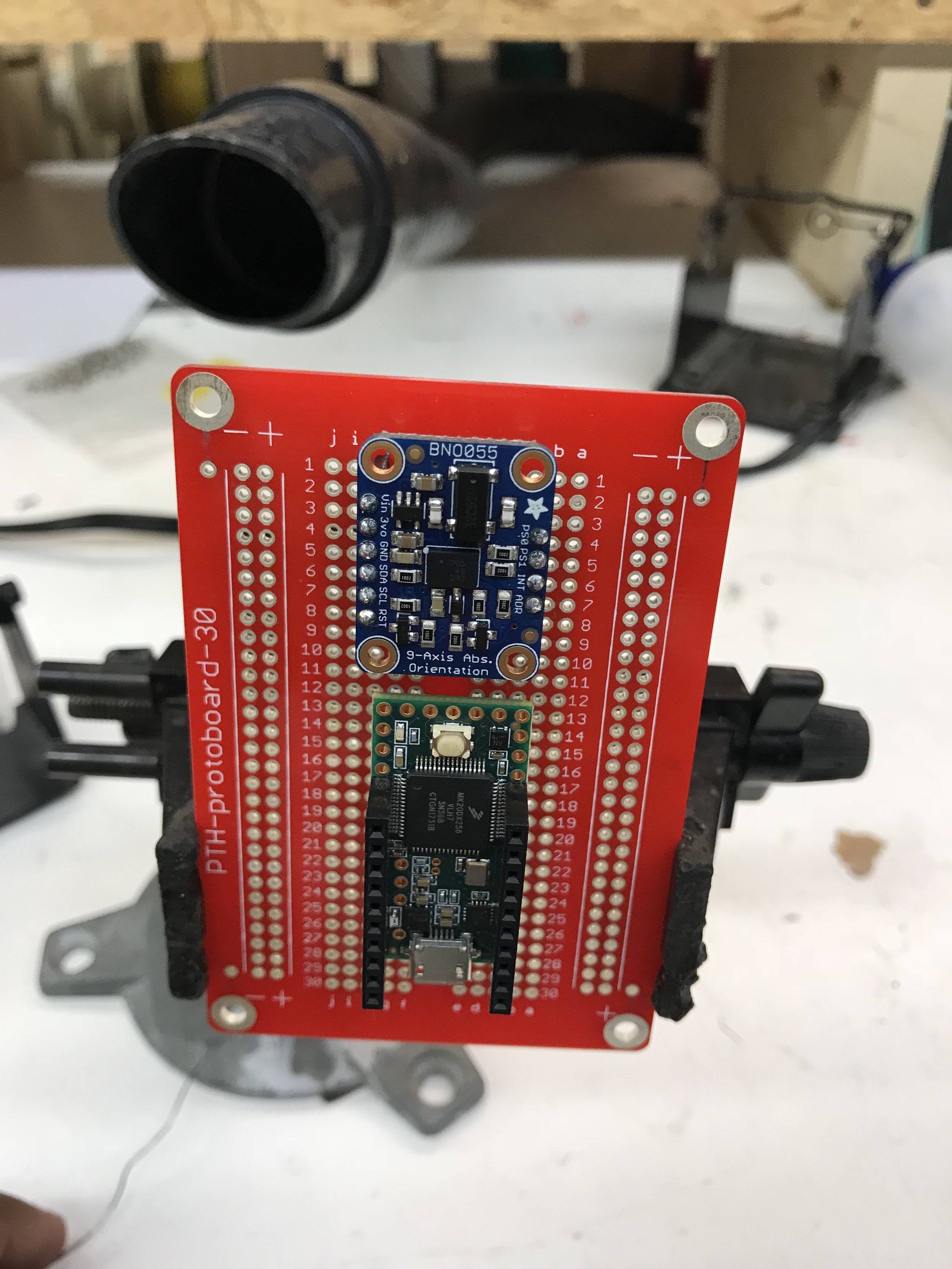
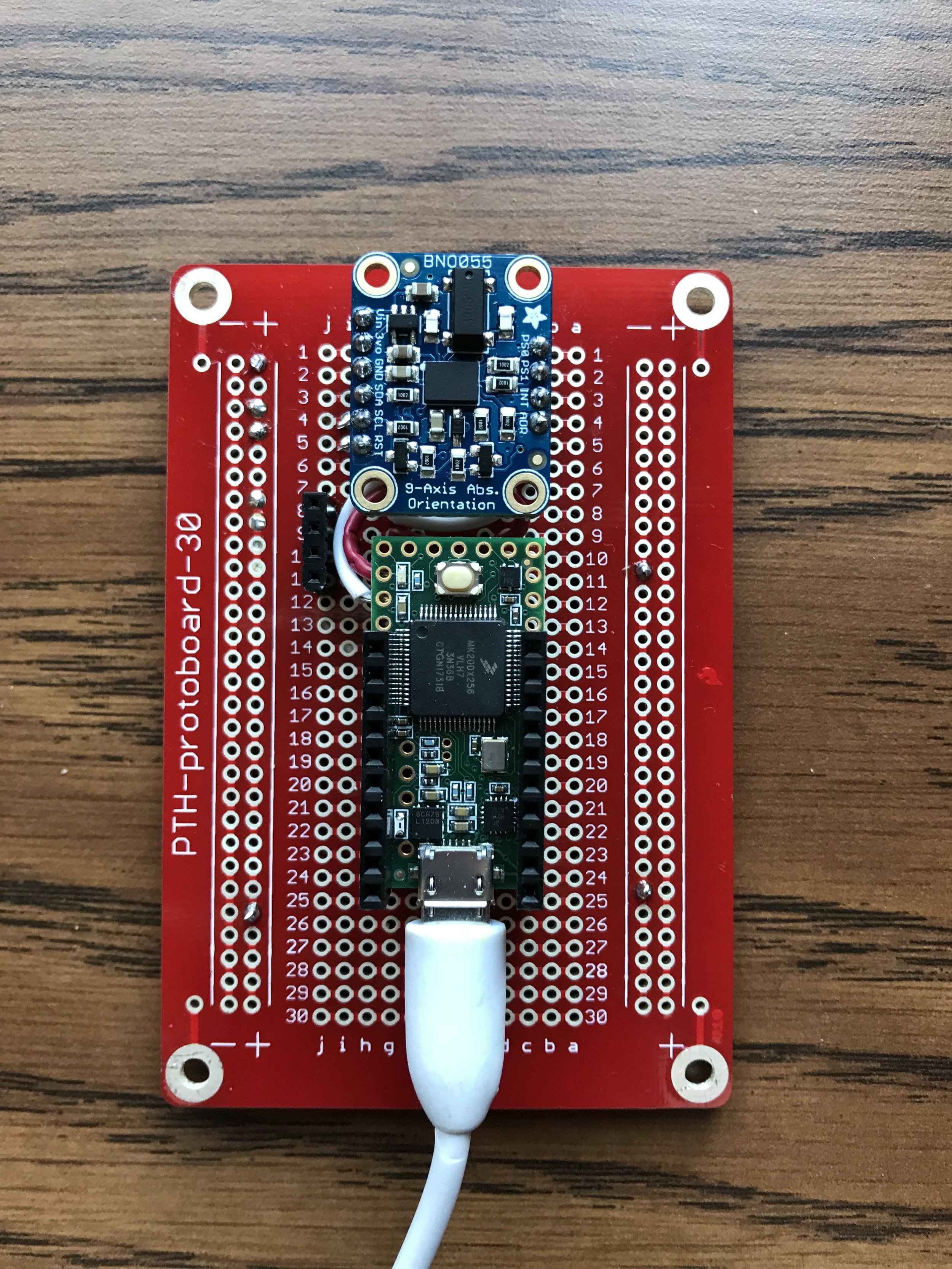
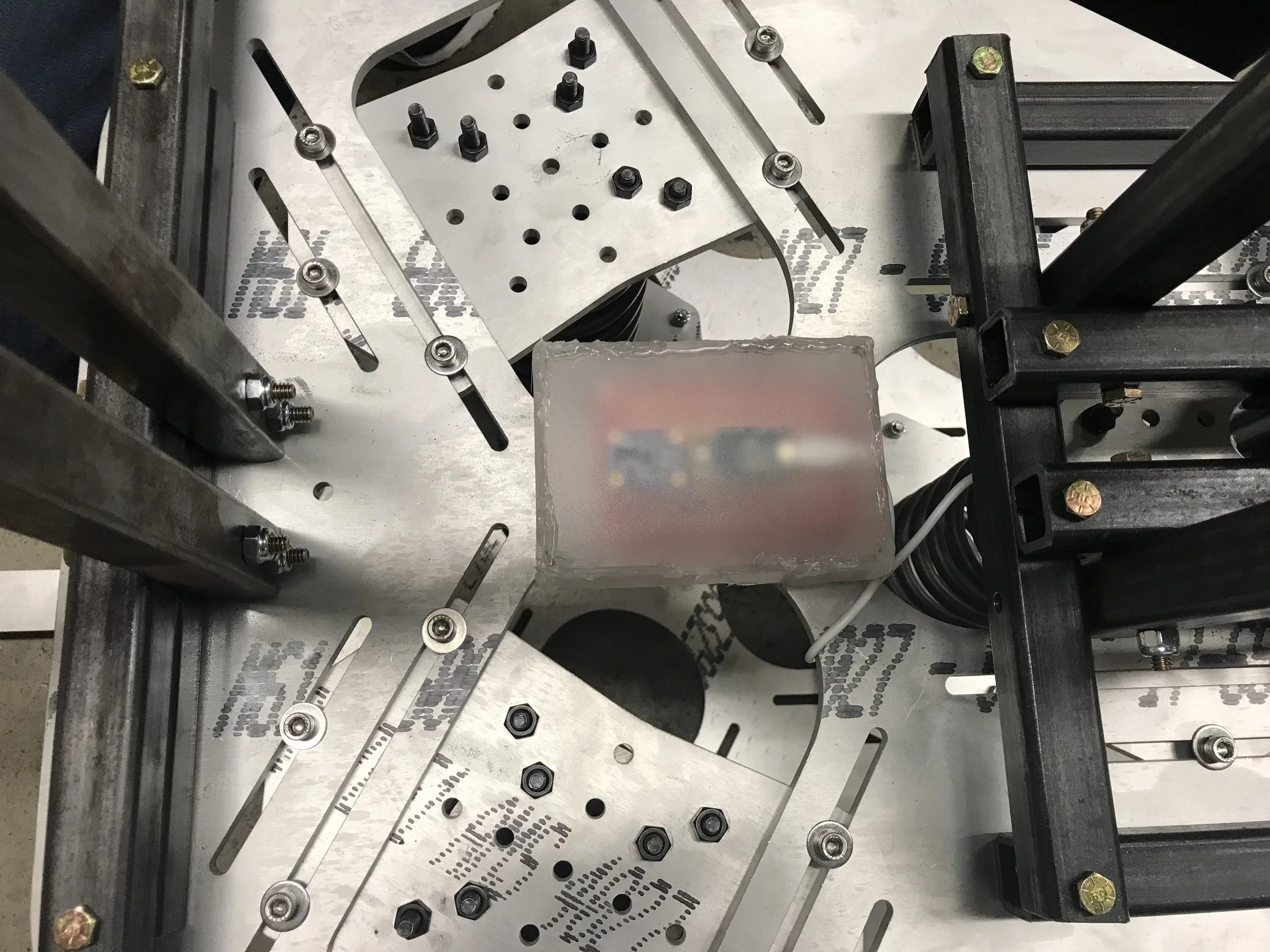
When you tilt in the rig in real life, you tilt the same amount in the Virtual environment. In order to facilitate this we designed a circuit that take I2C inputs from an Inertial Measurement Unit (IMU) and feeds it through a microcontroller (Teensy 3.2) so that the IMU data can be used as a joystick in the game. As a result of this sensor unit, the game becomes very immersive since real world actions directly scale to virtual movement.
Virtual Environment
The VR development was done in Unity. The basic gist was to have an immersive flight simulator with some add-ons. The game begins with Hagrid telling the flyer to be careful since there are beasts around. Then a dragon breaths fire on Hagrid and the flight simulator begins. Within the game, the broomstick flies very similarly to an airplane with roll/pitch/yaw inputs from IMU corresponding to similar actions in game. The landscape is procedurally generated which means an infinite flight simulator with trees and water assets.
Conclusion:
This project was a blast to work on even though long hours had to be put in. It is fun to ride on and we believe it is an interesting application of technology to something that appeals to a wide range of people.
Improvements:
-6061 Aluminum flexed quite a bit when we were testing. Although the stress and strain were within normal limits for the material, if another iteration is made we would use a more rigid metal.
-Since the VR is developed on a computer, we can continue developing even after the hackathon ends, so we are going to add a few more gamemodes (using Wii remotes to cast spells, etc.)
-Since our design is modular, we might need to use stiffer springs with higher K constants in order to make the motion stiffer and accommodate higher masses.